ESMD Course Material : Fundamentals of Lunar and
Systems Engineering for Senior Project Teams, with Application to a
Lunar Excavator
Contact: David Beale, dbeale@eng.auburn.edu
Contact: David Beale, dbeale@eng.auburn.edu
|
|
Chapter 1: Introduction to Lunar
Excavator Design for Senior Project Students
David Beale Contents
There is much interest in returning to the moon, and living there on a permanent and sustainable lunar base. However the lunar environment is quite challenging, even though there are significant resources available. Perhaps the most valuable resource is the lunar dirt called regolith, which will need to be excavated from the lunar surface using machinery specially designed for that purpose, which we will call a “lunar excavator”. The purpose of this handbook is to provide the student engineering design team the basic skills and background to design equipment for the moon. Designing an excavator for use on the moon will produce an entirely different excavator than one designed for use on earth. While you have been taught the skills to analyze and design parts and systems for use on the earth, that background does not translate to the moon without some background information to fill in knowledge gaps. The student designer needs to add a few new tools to the design toolbox. · Chapter 1 is a historical overview of the lunar missions and the scientific and engineering accomplishments, a review of past and future missions, and available published resources from space and previous moon missions. · Systems Engineering (SE) is the design methodology for multidisciplinary engineering projects practiced by NASA, DOD and other large engineering organizations. Chapter 2 covers SE and is meant to simplify a complex and some say tedious design methodology, while providing a working knowledge of SE so that it can be applied on your project. The presentation divides SE into Phases, and a set of 11 SE functions that can be applied in each phase in a step-by-step manner. Some of the SE functions require SE tools. Follow the process with your team as presented in the chapter, and schedule reviews with your NASA sponsor. The cubesat example in Chapter 3 is an example application of the process. Chapter 4 presents some more examples of use of SE tools, supplementing the material in Chapter 2. · Chapter 5 explains the lunar environment and what the engineering designer needs to know about it, including gravity, the lunar vacuum, radiation, temperatures and regolith chemistry, engineering and geotechnical properties. · Chapter 6 can be thought of as terse version of junior-level machine component design, but for the moon. It includes component design and selection for the moon, specifically a list of standards and design space handbooks, a look at the lunar rover, mechanical components selection, materials, and power system components. · Chapter 7 includes basics of thermal control for lunar systems, which builds on student coursework in heat transfer to extend and apply those basic principles, because temperature ranges can be quite extreme and damaging to equipment if not properly designed and protected. · Chapter 8 shows an example of a computer-aided simulation of an excavator. Modeling using simulation tools such as FEA, multibody dynamic simulation and control system simulation will be important tools in some projects, since you cannot test your prototype here on earth under the same conditions that exist on the moon.
Comparison of the Earth
and Moon
Figure 1. Earth and Moon Comparison ( (Heiken, Vaniman, & French, 1991) Figure 1, from the Lunar Sourcebook CD (Heiken et al., 1991), compares the earth and the moon. The moon is 1/80 the mass of the earth and about ¼ the diameter. The gravity is 1/6 that of earth. Note the lunar day temperature extremes, almost no atmosphere when compared to earth, and the time for the moon to rotate around the earth is 27.322 days (sidereal month). Temperatures can be extremely high and extremely low. Chapter 5 discusses the lunar environment in detail. Excavators
On earth there is a wide variety of engineering vehicles for both construction and mining. The Caterpillar website http://www.cat.com/cda/layout?m=37840&x=7 , the Komatsu websitehttp://www.komatsu.com/ce/index.html, and http://en.wikipedia.org/wiki/Engineering_vehicles (not reviewed) include a wide variety of machinery for construction and mining.
Figure 3. Excavator (but not a lunar excavator) Construction, mining and unloading/loading equipment will be needed to build and sustain a lunar base. Envisioned uses include unloading of cargo from lunar landers, positioning and lifting loads, transporting loads, preparing the surface for landing pads and roads and habitats (site preparation), building berms and trenches, assembling base structures, building slopes, digging and drilling, transporting and unloading of lunar soil. Past
Lunar Missions
In 1962, President John F. Kennedy reaffirmed American’s commitment to landing a man on the moon before 1970. “We choose to go to the moon. We choose to go to the moon in this decade and do the other things, not because they are easy, but because they are hard, because that goal will serve to organize and measure the best of our energies and skills, because that challenge is one that we are willing to accept, one we are unwilling to postpone, and one which we intend to win, and the others, too.” What followed was a period of rapid engineering and scientific innovative, culminating with the first astronaut landing on the moon in 1969. These were the Apollo Missions, and they have led to much of our present-day understanding of the moon. The Lunar and Planetary Institute http://www.lpi.usra.edu/ (LPI, 2008) is a repository of a significant portion of lunar history information. In particular the lunar mission timeline http://www.lpi.usra.edu/lunar/missions/ shows all the missions from the 1950’s through planned missions in 2018. Missions are either manned missions, satellites, or robotic landing missions. The Apollo mission collected about 300 kg of regolith which was returned to the earth.
Figure 4. Landing spots on the lunar surface (Heiken et al., 1991) Notice from Figure 4 that most of the landing sites have been near the equator and mid-latitudes. Recently, Lunar Prospector and Clementine missions have flown over the lunar poles and sensed the presence of significant amounts of hydrogen in the dark (permanently shadowed) polar craters, which could be water ice. Figure 5. Photograph of Apollo Lunar Roving Vehicle (LRV) (Heiken et al., 1991) Apollo missions 14-18 used a rover to transport the astronauts (Figure 5). It was a foldable four-wheeled vehicle, battery powered and weighing about 700 kg. Astronauts used them for extended EVAs (Extravehicular activities). Astronaut Harrison Schmitt of Apollo 17 stated that he and another astronaut drove 7 km from the landing module at speeds of 10 km per hour on level ground. “This may not seem fast, but when you hit a bump in 1/6 gravity at this speed, you spend the next 10 m off the ground… it could climb and descend slopes of 25 degrees…. it proved to be the reliable, safe and flexible lunar transport vehicle we expected it to be” (Eckart, 1999). Present
and Future
In 2004, President George W. Bush unveiled a new direction and vision for NASA to "gain a new foothold on the moon and to prepare for new journeys to the worlds beyond our own." To further that direction the NASA’s Exploration Systems Mission Directorate (ESMD) http://www.nasa.gov/directorates/esmd/home/index.html is dedicated to creating a “constellation of new capabilities, supporting technologies and foundational research that enables sustained and affordable human and robotic exploration”. The LCROSS mission in 2008 will search for water in a polar
crater, by crashing a rocket into the moon and analyzing the debris
plume for water (ice and vapor), hydrocarbons and hydrated
materials. Launched simultaneously, the Lunar Reconnaissance Orbiter
(LRO) is a Moon orbiting mission for the purpose of mapping the
surface to characterize future landing sites, and for future use as
a lunar base by seeking sites suitable for in-situ resource
utilization (ISRU). NASA plans on returning to the moon by 2020. The
Ares I launch vehicle is being designed to launch the Crew
Exploration Vehicle (CEV) named Orion, which includes the crew
capsule. 1.2.1 Lunar Base Architectures
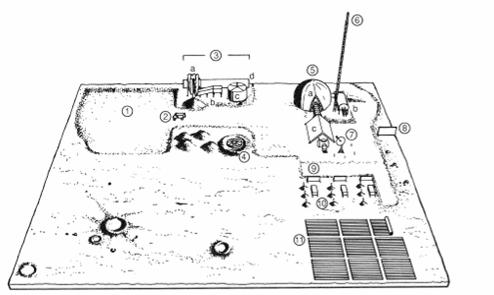
Many lunar base architectures have been proposed, Figure 6 and 7 shows two architecture. In Figure 7 Location 1 is a pit where regolith has been excavated, and brought by a hauler (2) to a processing plant (3) where oxygen is extracted from the regolith. Other parts of the base include a nuclear reactor (4), habitat and airlocks (5), radio tower (6), dish antenna (7), radiators (8) and (9), fuel cells (10) and Ga-As photovoltaic solar cell arrays (11).)
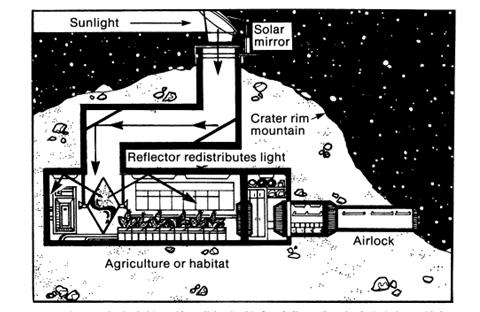
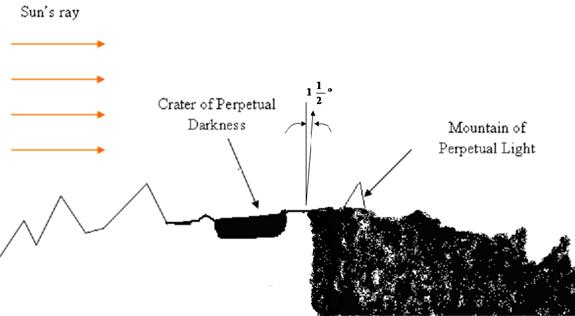
Figure 6. Concept of a Lunar Base Architecture ((Heiken et al., 1991) Figure 7. Concept for a Lunar Base at a Pole (Burke, 1985) Because the moon’s axis of spin is only +/-1.6 degrees with respect to its orbit around the sun, permanently-shadowed “dark” craters may exist near regions where the Sun never fully sets, as shown in Figure 8. The combination of a dark cold craters (perhaps as low as 40 degrees K) with continuous sunlight nearby (on the mountains) can be put to use for thermodynamic cycle power generation. Burke (Burke, 1985) in Figure 7 proposed lunar base with a rotating solar mirror to collect the sunlight, and always pointing toward the sun. The light from the sun is concentrated to heat a fluid in a pipe, powering the thermodynamic cycle, with the heat rejected to a radiator located in a cold crater. Solar cells controlled to always point near the sun could provide continuous power.
Figure 8. Polar region, showing dark craters and perpetual light
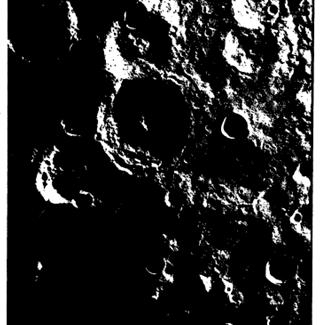
mountains. Locations for the lunar base are now being considered. Figure
9 shows a view of the south pole and the Amundsen Crater at the
center, which is about 100 km diameter. The right side of the
photograph is in sunlight and the left side in shadow.
Figure 9. South Pole region (Burke, 1985) Lunar Robots and VehiclesGiven the hazards of astronaut exposure to the lunar environment, many of the tasks needed to build a lunar base will be performed by robots and robotic vehicles. NASA is currently developing the technology, including “Robonaut” and a lunar truck named “Chariot”.
Figure 10. “Robonaut” is a 40 degree-of-freedom human-scale upper body “humanoid” robot, featuring hand dexterity, stereo vision cameras for eyes and object perception, and numerous tactile, force and position sensors.
Figure 11. “Centaur” combines a four-wheeled vehicle base
with Robonaut for the purposes of teleoperated or autonomous
operations (such as using tools) on lunar and planetary surfaces.
Figure 12. In the teleoperation mode, a seated human operator’s hands and head motion are copied (with a time delay from computational overhead) by Robonaut. The operator wears a visor system that displays the view of stereo vision cameras, and gloves with numerous position sensors for locating fingers and hands.
Figure 13. Robonaut in the teleoperated mode, gripping and positioning a battery-powered electric drill socket over a bolt, and later tightening the bolt.
Figure 14. In the autonomous mode, Robonaut uses vision recognition and force and position control to carefully lift a fragile box without crushing it.
Figure 15. The lunar truck or “chariot”, from http://www.nasa.gov/images/content/217374main_jsc2008e019176.jpg. The vehicle has 6 wheel sets that can turn 360 degrees, so the vehicle can be driven sideways for climbing and descending into craters. An interfacing plate for an excavator can be attached to the front.
Figure 16. The chariot interfacing plate, for attaching equipment such as an excavator.
Technology Readiness Level
NASA measures the maturity of a technology on a scale from 1 to 10. TRL 1 level projects are considered basic research (most student excavator projects will start here and stay low TRL level). TRL 9 means the technology is mission ready (for an excavator that implies it is ready to send to the moon).
Figure 17. Technology Readiness Level
Figure 18. Technology Readiness Level Description ITAR and EAR
US export control laws and regulations are defined by ITAR and EAR. ITAR is a law entitled "International Traffic in Arms Regulations" that restricts export of defense articles, while "Export Administration Regulations" (EAR) restricts exporting of dual-use technologies. "Export" is defined as the transfer of anything to a foreign person by any means. ITAR specifically regulates information required for the design, development, production, manufacture, assembly, operation, repair, testing, maintenance or modification of defense articles. This includes information in the form of blueprints, drawings, process specifications, photographs, plans, instructions, and documentation. NASA projects could be subject to ITAR and EAR. More information is available at: http://www.pri-network.org/resource/attach/496/ITAR.pdf
|









{kind=link}