
Project Description
Autonomous Drone and Ground Robot Cooperative Tasking in Complex Indoor Environments
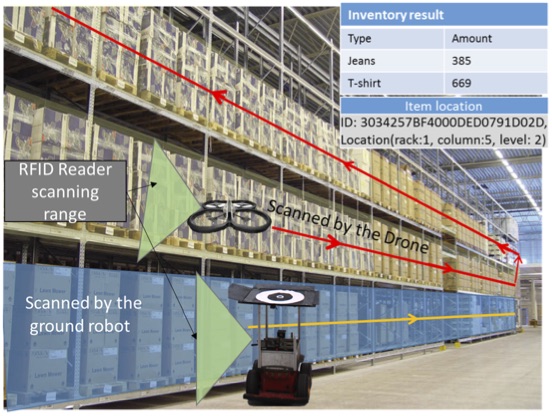
The requirements for automated inventory and precise location of items have become vital to modern supply chain management. The objective of this project is to create an innovative ground robot-drone network system, which consists of a group of autonomous ground robots and drones, to provide inventory counts and precise locations of passive radio-frequency identification (pRFID) tagged items in highly complex environments, such as warehouses, retail stores, hazmat storage facilities, or factories. In the proposed research, the autonomous ground robot-drone network system combined with a precise RFID localization method will bridge the above gap. By deploying cooperative ground robots and drones, mounted with commercial off-the-shelf pRFID equipment, to provide automated inventory and precise location of pRFID tagged items. The framework cooperates heterogeneous individual items into a coherent system for more complex task that is not possible for any individual item. The proposed architecture will also provide an innovative communication, control, and computing framework for general IoT systems.
Aug. 1, 2019 ~ July 31, 2023
Project Team
-
Zhitao Yu
-
Xianyu Wang
Related Publications (journal & magazine)
-
C. Yang, X. Wang, and S. Mao, “RFID-Pose: Vision-aided 3D human pose estimation with RFID,” IEEE Transactions on Reliability, to appear. DOI: 10.1109/TR.2020.3030952.
-
S. Misra, P. K. Deb, N. Koppala, A. Mukherjee, and S. Mao, “S-Nav: Safety-aware IoT navigation tool for avoiding COVID-19 hotspots,” IEEE Internet of Things Journal, vol.8, no.8, pp. 6975-6982, Apr. 2021. DOI: 10.1109/JIOT.2020.3037641.
-
X. Wang, R. Huang, C. Yang, and S. Mao, “Smartphone sonar based contact-free respiration rate monitoring,” ACM Transactions on Computing for Healthcare, vol.2, no.2, Article 15, Mar. 2021. DOI: 10.1145/3436822.
-
X. Wang, X. Wang, and S. Mao, “Indoor fingerprinting with bimodal CSI tensors: A deep residual sharing learning approach,” IEEE Internet of Things Journal, vol.8, no.6, pp.4498-4513, Mar. 2021. DOI: 10.1109/JIOT.2020.3026608.
-
X. Wang, X. Wang, S. Mao, J. Zhang, S. CG Periaswamy, and J. Patton, “Indoor radio map construction and localization with deep Gaussian Processes,” IEEE Internet of Things Journal, vol.7, no.11, pp. 11238-11249, Nov. 2020. DOI: 10.1109/JIOT.2020.2996564.
-
X. Wang, C. Yang, and S. Mao, “Resilient respiration rate monitoring with realtime bimodal CSI data,” IEEE Sensors Journal, vol.20, no.17, pp.10187-10198, Sept. 2020. DOI: 10.1109/JSEN.2020.2989780.
-
C. Yang, X. Wang, and S. Mao, "Unsupervised drowsy driving detection with RFID," IEEE Transactions on Vehicular Technology, vol.69, no.8, pp. 8151-8163, Aug. 2020. DOI: 10.1109/TVT.2020.2995835.
-
X. Wang, C. Yang, and S. Mao, "Resilient respiration rate monitoring with realtime bimodal CSI data,” IEEE Sensors Journal, vol.20, no.17, pp.10187-10198, Sept. 2020. DOI: 10.1109/JSEN.2020.2989780.
-
J. Zhang, Z. Yu, S. Mao, S. CG Periaswamy, J. Patton, and X. Xia, "IADRL: An imita-tion augmented deep reinforcement learning network enabled UGV-UAV complementary coalitions," IEEE Access Journal, Special Section on Advanced Communications and Networking Techniques for Wireless Connected Intelligent Robot Swarms, vol.8, no.1, pp.102335-102347, June 2020. DOI: 10.1109/ACCESS.2020.2997304.
-
J. Zhang, Z. Yu, X. Wang, Y. Lyu, S. Mao, S.C.G. Periaswamy, J. Patton, and X. Wang, “RFHUI: An RFID based human-unmanned aerial vehicle interaction system in an indoor environment,” Elsevier Digital Communications and Networks Journal, vol.6, no.1, pp.14-22, Feb. 2020. DOI: 10.1016/j.dcan.2019.05.001..
-
X. Wang, J. Zhang, Z. Yu, S. Mao, S.C.G. Periaswamy, and J. Patton, “On remote temperature sensing using commercial UHF RFID tags,” IEEE Internet of Things Journal, vol.6, no.6, pp. 10715-10727, Dec. 2019. DOI: 10.1109/JIOT.2019.2941023.
-
J. Zhang, S.C.G. Periaswamy, S. Mao, and J. Patton, “Standards for passive UHF RFID,” ACM GetMobile, vol.23, no.3, pp.10-15, Sept. 2019. DOI: 10.1145/3379092.3379098..
-
X. Wang, Z. Yu, and S. Mao, “Indoor localization using magnetic and light sensors with smartphones: A deep LSTM approach,” Springer Mobile Networks and Applications (MONET) Journal, Special Issue on Towards Future Ad Hoc Networks: Technologies and Applications, vol.25, no.2, pp.819-832, Apr. 2020. DOI: 10.1007/s11036-019-01302-x..
-
X. Xia, T. Roppel, J. Zhang, Y. Lyu, S. Mao, S.C.G. Periaswamy, and J. Patton, “Enabling a mobile robot for autonomous RFID-based inventory by multilayer mapping and ACO-enhanced path planning,” Journal of Robotics & Automation Technology, vol.1, no.1, pp.1-13, Sept. 2019. DOI: OJRAT.MS.ID.000501.
-
J. Zhang, X. Wang, Z. Yu, Y. Lyu, S. Mao, S.C.G. Periaswamy, J. Patton, and X. Wang, “Robust RFID based 6-DoF localization for unmanned aerial vehicles,” IEEE Access Journal, Special Section on Network Resource Management in Flying Ad Hoc Net-works: Challenges, Potentials, Future Applications, and Wayforward, vol.7, no.1, pp. 77348-77361, June 2019. DOI: 10.1109/ACCESS.2019.2922211.
-
C. Yang, X. Wang, and S. Mao, “Unsupervised detection of apnea using commodity RFID tags with a recurrent variational autoencoder,” IEEE Access Journal, Special Section on Advanced Information Sensing and Learning Technologies for Data-centric Smart Health Applications, vol.7, no.1, pp.67526-67538, June 2019. DOI: 10.1109/ACCESS.2019.2918292.
Related Publications (book chapter)
-
X. Wang and S. Mao, “Respiration monitoring using smartphone sonar,” Chapter 13 in Contactless Vital Signs Monitoring, W. Wang and X. Wang (editors), Amsterdam, Netherlands: Elsevier, 2021. ISBN: 9780128222812.
-
C. Yang, X. Wang, and S. Mao, “RFID based unsupervised apnea detection,” Chapter 2 in Intelligent IoT Systems in Personalized Health Care, A.K. Sangaiah and S.C. Mukhopadhyay (editors), Amsterdam, Netherlands: Elsevier, 2020. ISBN: 9780128211878.
Related Publications (conference) (my students and visting scholars/students are marked with )
-
C. Yang, X. Wang, and S. Mao, “RFID-based vital sign monitoring,” invited paper, in Proc. The 2021 IEEE-EMBS International Conference on Biomedical and Health Informatics (BHI), Special Session: Contactless Vital Signs Monitoring for AI Healthcare, Virtual Conference, July 2021.
-
X. Wang and S. Mao, “Acoustic-based vital sign monitoring,” invited paper, in Proc. The 2021 IEEE-EMBS International Conference on Biomedical and Health Informatics (BHI), Special Session: Contactless Vital Signs Moni-toring for AI Healthcare, Virtual Conference, July 2021.
-
X. Wang, J. Zhang, S. Mao, S.C.G. Periaswamy, and J. Patton, “MulTLoc: RF hologram tensor filter-ing and upscaling for indoor localization using multiple UHF passive RFID tags,” invited paper, in Proc. ICCCN 2021, Athens, Greece, July 2021.
-
M. Patil, X. Wang, X. Wang, and S. Mao, “Adversarial attacks on deep learning-based floor classification and indoor localization,” in Proc. 2021 ACM Workshop on Wireless Security and Machine Learning (WiseML’21), Abu Dhabi, United Arab Emirates, June-July 2021. DOI: 10.1145/3468218.3469052
-
X. Wang, M. Patil, C. Yang, S. Mao, and P. A. Patel, “Deep Convolutional Gaussian Processes for mmWave Outdoor Localization,” invited paper, in Proc. IEEE ICASSP 2021, Special Session on Contactless and Wireless Sensing for Smart Environments, Toronto, Canada, June 2021, pp.8323-8327. DOI: 10.1109/ICASSP39728.2021.9414388
-
C. Yang, X. Wang, and S. Mao, “Demo Abstract: Vision-aided 3D human pose estimation with RFID,” Demo, in Proc. The 16th IEEE International Conference on Mobility, Sensing and Networking (MSN 2020), Tokyo, Japan, Dec. 2020, pp.628-629. DOI: 10.1109/MSN50589.2020.00104
-
C. Yang, X. Wang, and S. Mao, “Subject-adaptive skeleton tracking with RFID,” invited paper, in Proc. The 16th IEEE International Conference on Mobility, Sensing and Networking (MSN 2020), Tokyo, Japan, Dec. 2020, pp.599-606. DOI: 10.1109/MSN50589.2020.00098
-
J. Purohit, X. Wang, S. Mao, X. Sun, and C. Yang, “Fingerprinting-based indoor and outdoor localization with LoRa and deep learning,” in Proc. IEEE GLOBECOM 2020, Taipei, Taiwan, Dec. 2020.
-
C. Yang, X. Wang, and S. Mao, “RFID-based driving fatigue detection,” in Proc. IEEE GLOBECOM 2019, Waiko-loa, HI, Dec. 2019.
-
X. Zhou, Y. Lin, Y. Tu, S. Mao, and Z. Dou, “Dynamic channel allocation for multi-UAVs: A deep reinforcement learning approach,” in Proc. IEEE GLOBECOM 2019, Waikoloa, HI, Dec. 2019.
-
C. Yang, X. Wang, and S. Mao, “SparseTag: High-precision backscatter indoor localization with sparse RFID tag arrays,” in Proc. IEEE SECON 2019, Boston, MA, June 2019.
-
C. Yang, X. Wang, and S. Mao, “AutoTag: Recurrent variational autoencoder for unsupervised apnea detection with RFID tags,” in Proc. IEEE GLOBECOM 2018, Abu Dhabi, United Arab Emirates, Dec. 2018, pp.1-7.
-
X. Wang, X. Wang, S. Mao, J. Zhang, S.C.G. Periaswamy, and J. Patton, “DeepMap: Deep Gaussian Process for indoor radio map construction and location estimation,” in Proc. IEEE GLOBECOM 2018, Abu Dhabi, United Arab Emirates, Dec. 2018, pp.1-7.
-
J. Zhang, Z. Yu, X. Wang, Y. Lyu, S. Mao, S.C.G. Periaswamy, J. Patton, and X. Wang, “RFHUI: An intuitive and easy-to-operate human-UAV interaction system for controlling a UAV in a 3D space,” in Proc. EAI MobiQuitous 2018, New York City, NY, Nov. 2018, pp.69-76.
-
X. Wang, Z. Yu, and S. Mao, “DeepML: Deep LSTM for indoor localization with smartphone magnetic and light sensors,” in Proc. IEEE ICC 2018, Kansas City, MO, May 2018.
We acknowledge the generous support from our sponsor
This work is supported in part by the U.S. National Science Foundation (NSF) under Grant ECCS-1923163. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the authors and do not necessarily reflect the views of the foundation.