John Y. Hung

An Inverted Pendulum on a Cart
A Senior-Year Design Project
Teams of 3 students design, construct, and test a complete inverted pendulum on a cart. The engineering objective is to control the cart motion so that the pendulum remains upright. The cart is driven by two DC hobby motors. Pendulum position is detected by an infrared sensor.
Student activities include:
-
Develop a nonlinear model of system dynamics using Lagrange's method.
-
Linearize the model and identify parameters.
-
Design a compensator by classical root locus and frequency response methods.
-
Use MATLAB/SIMULINK to simulate and analyze system behavior
-
Implement the compensator in assembly language on a Motorola 68HC11
microcontroller.
-
Produce the control signal using either pulse-width-modulation or a
digital-to-analog converter.
-
Design either a switching amplifier or linear amplifier to drive the motors.
-
Design a position sensor.
-
Integrate all components.
-
Write biweekly project status reports, and give oral briefings.
-
Write a design proposal and final report.
-
Give a public oral presentation during the College of Engineering E-Day.
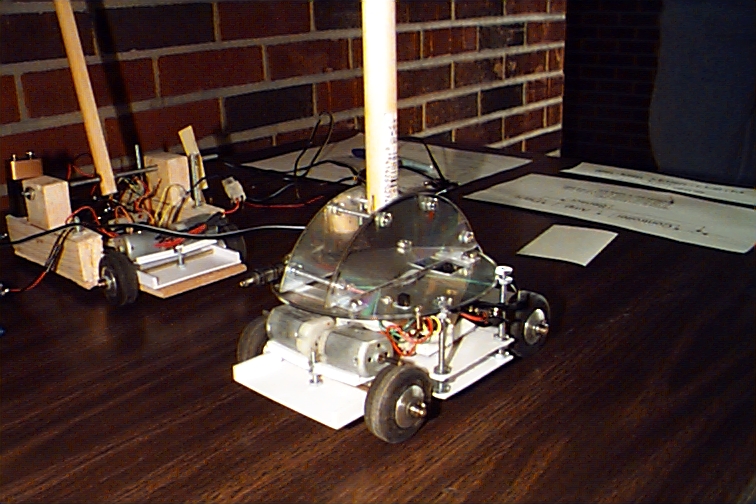
Figure 1. View showing twin drive motors. Microcontroller is behind motors.

Figure 2. IT WORKS!
Back to John Hung's home page
Last updated October 12, 2000