John Y. Hung

Robotics Research

Autonomous robot towing a trailered geophysical sensor. Robot navigates via GPS with
real time kinetic (RTK) corrections, and can guide the trailer within 2 cm of the desired path.
Project was developed by David Hodo, in collaboration with the U.S. Army Corps of Engineers.
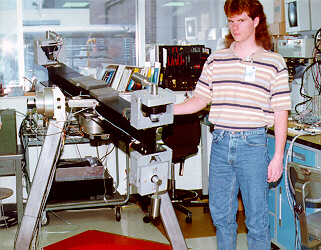
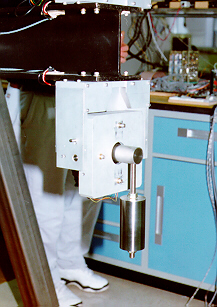
(left) Gimbaled payload using rotating unbalanced masses. (right) Closer view of the rotating unbalanced
mass. As the mass spins, coriolis effects cause the payload (representing a telescope) to scan in a
circular pattern. Experiment is located at NASA Marshall Space Flight Center,
Huntsville, AL.
Related publications
-
W. Travis, D. W. Hodo, D. M. Bevly, and J. Y. Hung,
"UGV trailer position estimation using a dynamic base RTK system,"
in review 2008 AIAA Guidance, Navigation and Control Conference, Honolulu, HI, Aug 2008 .
-
D. W. Hodo, J. Y. Hung, D. M. Bevly, and S. Millhouse,
"Effects of sensor placement and errors on path following control of a mobile robot-trailer system,"
2007 American Control Conference, New York, NY, July 2007.
-
D. W. Hodo, J. Y. Hung, D. M. Bevly, and S. Millhouse,
"Analysis of trailer position error in an autonomous robot-trailer system with sensor noise,"
2007 IEEE International Symposium on Industrial Electronics, Vigo, SPAIN, June 2007.
-
C. A. Bishop, J. Y. Hung, M. E. Polites, and D. C. Alhorn,
"Dynamic modeling and control of rotating unbalanced mass (RUM)
actuated systems," 1998 American Astronautical Society Guidance and Control
Conference, Breckenridge, CO, Feb 1998.
-
J. Y. Hung, J. M. Gallaspy, and M. E. Polites,
"Dynamic models of instruments using rotating unbalanced mass devices,"
NASA/ASEE Final Report, Marshall Space Flight Center, Aug 1997.
-
C. A. Bishop, J. Y. Hung, M. E. Polites, and D. C. Alhorn,
"Pointing and scanning control of optical instruments using rotating unbalanced
masses," 1997 American Astronautical Society Guidance and Control
Conference, Breckenridge, CO, Feb 1997.
-
J. Y. Hung, D. A. McGee, and M. E. Polites,
"Pointing and scanning control of instruments using rotating unbalanced masses,"
NASA/ASEE Final Report, Marshall Space Flight Center, Aug 1996.
-
M. E. Polites, "New method for scanning spacecraft and balloon-borne/space-based experiments,"AIAA Journal of Guidance, Control and Dynamics, v.14, n. 3, p.548-553, May-June 1991.
Back to John Hung's home page
Last updated 16 February 2008