John Y. Hung

A Graduate Research Project
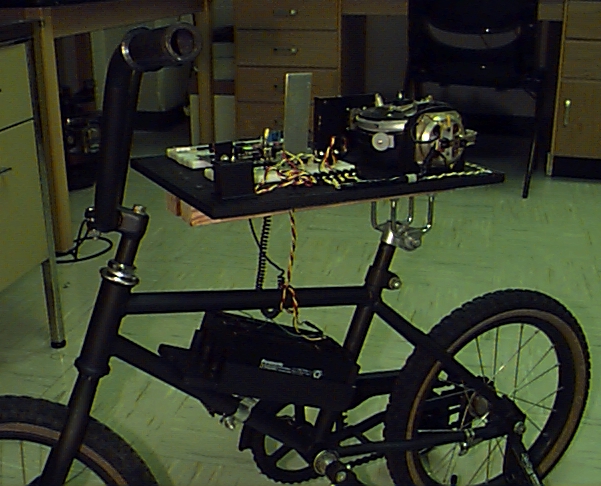
Side view of an unmanned, self-stabilizing bicycle.
Developed by Jason M. Gallaspy (1999)
Jason's Master of Science thesis addresses the gyroscopic stabilization of an
unmanned bicycle. The gimballed gyroscope produces torque on the
bicycle frame. A miniature gyro is used to sense the bicycle leaning angle.
The control algorithm is implemented on a Motorola 68HC11 microcontroller.
Jason also developed the electronic instrumentation to drive the gyro
motor and control motor.
Jason is presently employed by Dynetics, an engineering firm based in
Huntsville, Alabama.
Related publications
- Jason Matthew Gallaspy,
"Gyroscopic stabilization of an unmanned bicycle,"
M.S. thesis, Electrical Engineering Department, Auburn University, AL.
- Jason M. Gallaspy and John Y. Hung,
"Stabilization of a stationary unmanned bicycle,"
Back to John Hung's home page
Last updated September 22, 2000